用 DDS 開發 ROS 2.0
前言
這篇文章想要向大家介紹ROS 2.0的底層實作概念,雖然比較不會有程式實作的討論,但我覺得這一塊的深度滿值得介紹的,因為使用ROS有好幾種層次:
- 使用ROS的各種工具來建立自己的應用
- 在開發上碰到一些問題,修改現成的package來滿足自己的需求
- 開發自己的演算法,發布自己的package給其他人使用
- 協助開發與維護ROS的核心
這篇文章要討論的議題已經落在第四個層次,所以對於一般的使用者來說,可能不太具有直接應用的價值,但如果對於ROS的底層實作有更深入的理解(知道他是怎麼開發出來的、有哪些限制、有哪些優點),就可以在利用ROS撰寫自己的應用時,更能開發出效能最佳化的應用。
為什麼要開發ROS 2.0?
事實上,如果ROS 1.0 已經足夠完美,那我們就沒有必要討論ROS 2.0。不過事情當然不是這樣,因為ROS 1.0在開發的時候,是圍繞著一隻機器人來開發的,雖然當初的設計已經讓ROS變得很有彈性,可以被應用在各式各樣的機器人上,但是隨著使用者越來越多,超乎開發者想像的使用情境也越來越多。
也就是說,如果開發者們不積極地開始開發下一代的ROS,遲早會無法滿足越來越複雜而多樣化的需求。對於這些使用情境的具體描述,可以參考這裡。
開發ROS系統需要實現的模塊
首先來談論一下建立整個系統上,需要考慮的幾個重點:
- Discovery功能
- Publisher-Subscriber功能
- Service 與 Action功能
Discovery功能的意義是,只要有新的node啟動,就能在整個ROS node的網路中被看見(概念很像是我打開手機的wifi熱點分享,其他裝置就應該要可以發現有這個wifi熱點)。
接下來的Publisher-Subscriber功能、Service功能跟Action功能其實就是ROS使用者熟悉的Topic、Service跟Actionlib啦,本質上這幾種功能在處理的都是node之間的溝通(也就是程式之間的溝通,大家可以想像要讓一隻機器人正常運作,電腦上需要運行的程式一定是很多個,而且需要彼此溝通,所以底層的溝通機制需要有人來實作,不然就是…想開發機器人程式的你得自己實作)。如果你不太確定自己知不知道我在說什麼,可以看看這一篇區分Topic、Service跟Actionlib的文章。
DDS的系統層概念
想要實作上面這些功能,DDS並不是唯一的選擇,但是,OSRF(Open Source Robotic Foundation)的開發者經過嘗試之後,覺得這是最好的開發選項。細節理由可以看延伸閱讀的第3篇文章,這部分已經有中文翻譯了。
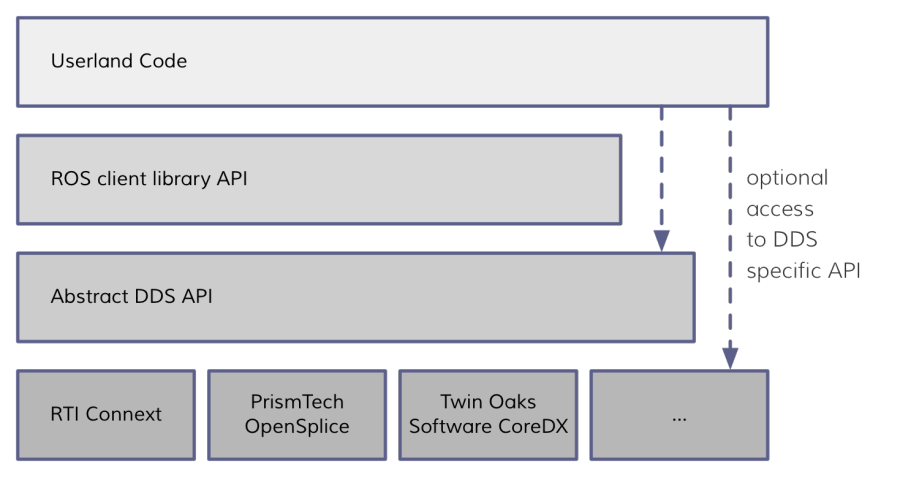
從上面這張圖可以清楚地看出,使用者所需要接觸到的只有最上面的兩層。使用者自己寫的code就屬於Userland Code,而使用者自己寫的code中呼叫到的ROS API (例如ros::init())就屬於ROS client library API,而DDS的API則是在更底層被ROS client library API所使用。
有趣的地方是,為了保持彈性,OSRF的開發者們希望使用者可以自己選擇底層使用的是哪一個版本的DDS (DDS像是一種標準,所以可以有不同公司提供自己的實作版本)。
一點細節的延伸
上面討論的都是概念的理解,對於技術有興趣的你想必沒辦法接受,所以就讓我們來看一點技術細節吧!
我們還是一樣先站在開發者的角度,最基本我們需要提供的工具就是Node初始化的函式對吧,這個函式的長相就像:
1 | Node::Node(std::string name): running_(true) |
大家先不要嚇到,一下有太多細節本來就不可能看懂,大家只需要看我用註解標記起來的區域,體驗一下什麼叫做ROS client library API呼叫DDS API的感覺就好。
那對於一個使用者來說,假設我今天要啟動一隻機器人,那就需要呼叫建立node的函式,看起來就像:
1 | TurtleApp(int& argc, char** argv): QApplication(argc, argv) |
你一定覺得奇怪,rclcpp::create_node()跟上面我講的Node::Node()建構子根本接不起來啊? 所以這邊就要補上一點點程式碼,想必你就懂了:
1 | void rclcpp::init(int argc, char** argv) |
總結
OK!簡介就到這邊啦,如果對於實作細節有興趣深入的讀者,不妨去看看ROS 2.0的github repo,詳細的程式碼全部都是開源的,所以可以從中學習開發的細節。
延伸閱讀
- 為什麼要開發ROS 2.0?
- 使用ZeroMQ跟相關的函式庫來開發ROS
- 使用DDS來開發ROS (仍在趕工中,歡迎開issue催促翻譯者QQ)
- ROS 2.0 wiki
- ROS DDS Prototype (Github Repo)
關於作者:
@pojenlai 演算法工程師,對機器人跟電腦視覺有少許研究,最近在鍛鍊自己的執行力
留言討論