使用 Gazebo 模擬器控制機器人建立 2D 地圖
前言
ROS 很吸引人的一個地方在於,他跟模擬器 Gazebo 很好地結合在一起,讓使用者可以使用一台筆記型電腦就開始撰寫機器人程式,而且可以在筆電上看到程式執行的結果。模擬器裡的機器人不會撞壞、不會沒電,所以就算在程式設計過程中有錯誤,也不會有任何硬體成本的損失 (時間當然是會損失),而且很容易大量測試演算法,因為可以在模擬器中設置各種場景,而不需要一個很大的空間和昂貴的機器人。這篇文章會簡單介紹怎麼在 Gazebo 裡面啟動 PR2,並遙控他來建立一個 2D 的地圖。
啟動 Gazebo 跟 PR2
我的測試環境是 Ubuntu 14.04 + ROS Indigo,不過使用的指令都很 general,即便你使用其他版本,應該也不會有什麼問題。
首先我們確定已經安裝所需要的套件:
1 | sudo apt-get install ros-indigo-gazebo-* |
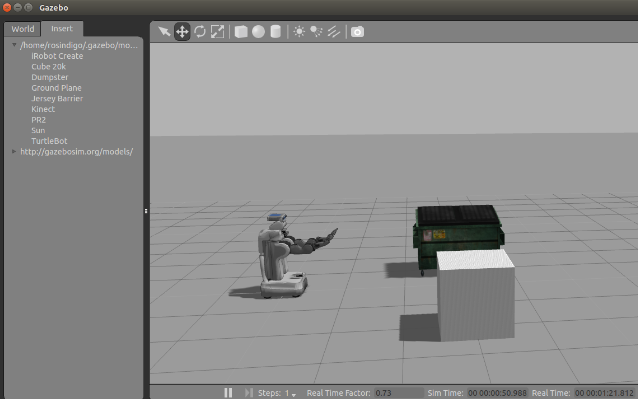
接下來在終端機輸入 gazebo 應該就可以成功啟動 Gazebo 模擬器。然後我們可以用現成的 package 啟動一個有 PR2 的空白模擬環境。
1 | roslaunch pr2_gazebo pr2_empty_world.launch |
Gazebo 裡面已經有很多現成的模型,選擇左邊的 Insert 頁籤,裡面就可以找到一些現成的模型,在這邊我先加入了 Cube 跟 Dumpster 的模型,加入後的結果如下圖:
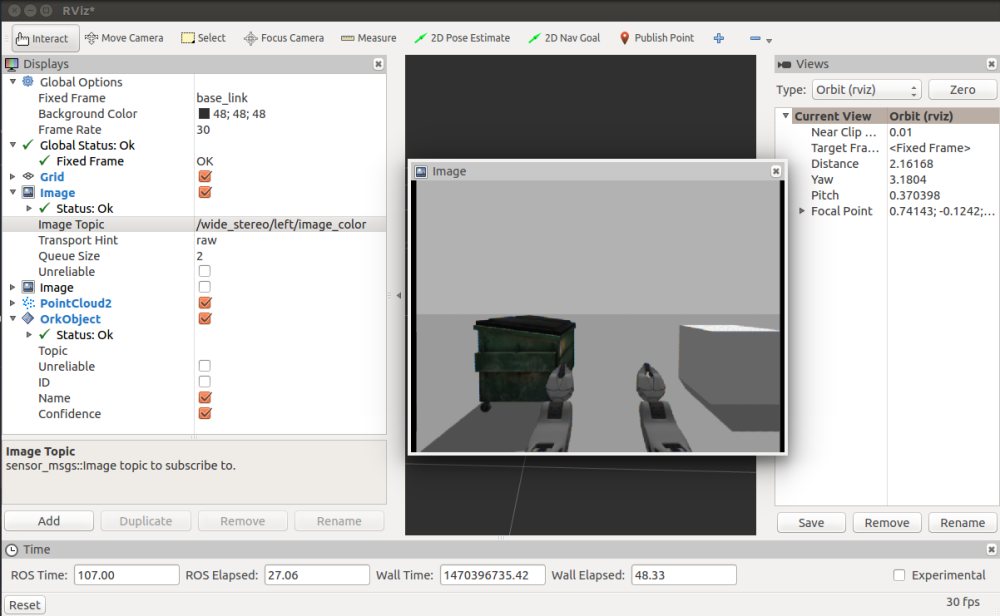
對於機器人來說,最重要的第一個環節就是感知功能,他必須要可以感知環境中的資訊,才能做出相對應的動作。所以我們會先關心的就是 Gazebo 裡面的 PR2 機器人可不可以接收到環境中的資訊。
答案當然是可以的,我們可以透過 ROS 提供的 visualizer Rviz 來觀看 PR2 接收到的資訊,如果是已經熟悉 ROS 的讀者,想必對 Rviz 不陌生,只要開一個新的終端機,輸入 rviz 就可以啟動了。啟動之後,可以 Add 一個 Image 的顯示框,然後選擇現在可以看到的 topic,就可以看到 Gazebo 裡面的 PR2 看到的畫面。
啟動 gmapping package 建地圖
環境都已經啟動了,接下來就要開始建地圖啦! 這邊我們使用的工具是 gmapping ,首先我們在隨便一個路徑新增一個 launch 檔 – vim pr2_build_map.launch 。
然後輸入這一串文字,儲存檔案後離開。
1 | <launch> |
然後可以用 roslaunch pr2_build_map.launch啟動。
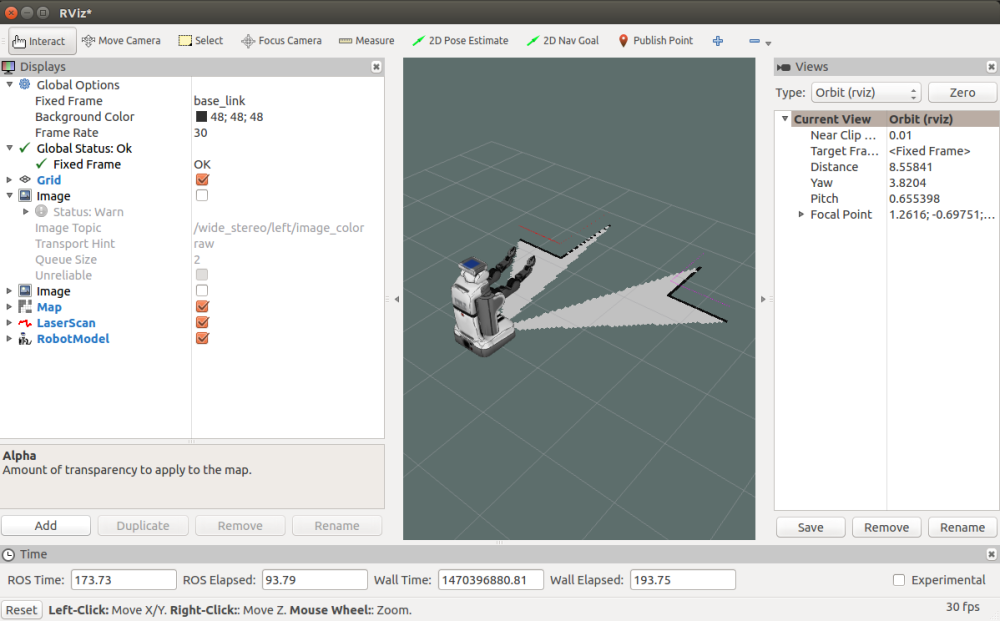
啟動 gmapping 之後,我們還是透過 Rviz 來觀看地圖建立的狀態,這邊需要加入 Map 的顯示,然後 topic 選擇 /map 就好。地圖中的黑色線就是障礙物,淺灰色區域表示是可以走的無障礙物區域,深灰色則是未知區域。
讓我們近看一下 map 的 topic 要怎麼選:
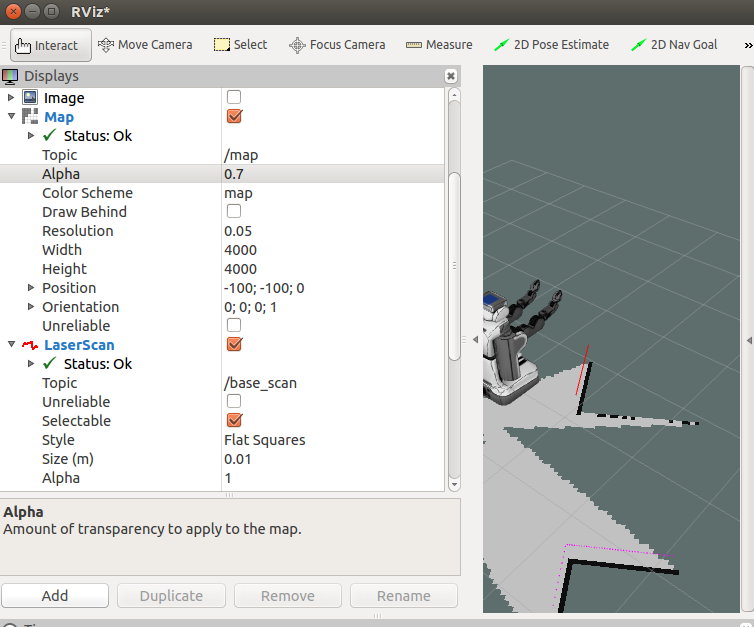
但如果機器人不能移動的話,就只能顯示眼前看到的這一塊地圖。所以我們先使用簡單的遙控程式來控制 Gazebo 裡面的 PR2 移動。
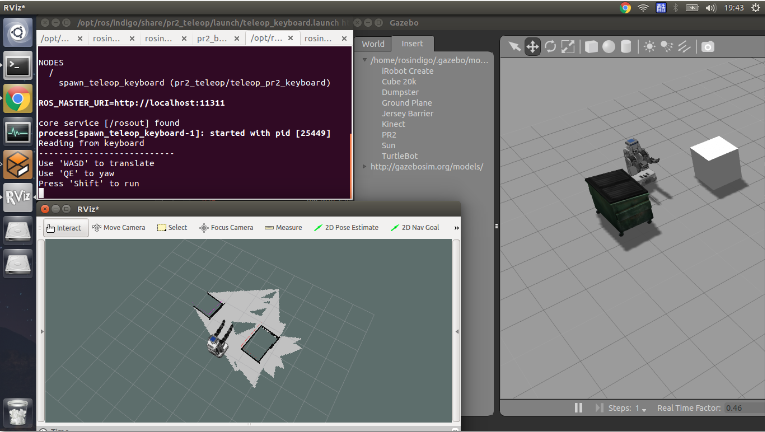
這邊只要啟動 teleop_keyborad 就可以用鍵盤控制機器人移動:
1 | roslaunch pr2_teleop teleop_keyboard.launch |
WASD 四個按鍵分別代表前左後右四個方向的平移、QE兩個按鍵是原地旋轉,這邊要注意必須選到啟動 teleop_keyboard的視窗,按按鍵才有用。使用 teleop 來控制 PR2 走一走之後,就可以看得出我們已經使用 gmapping 建立了一個看起來有模有樣的地圖了。
如果你想要把地圖存起來,提供未來要做 Navigation 使用,或只是單純想留個紀念,可以用一個指令把地圖存起來 – rosrun map_server map_saver 。
總結
這篇文章跟大家簡單介紹怎麼使用 Gazebo 模擬器來模擬機器人,並利用他實際操作了一個小小的 SLAM 功能,也建出了自己的一張地圖。我們能利用 Gazebo 來做的事情當然遠不止於此,不過時間有限,我們下次見。
延伸閱讀
關於作者:
@pojenlai 演算法工程師,對機器人跟電腦視覺有少許研究,最近在鍛鍊自己的執行力
留言討論