ROS SMACH 簡介
前言
這次想跟大家介紹一個好用的工具 - SMACH (唸法同 smash)。SMACH 的存在意義是為了讓大家可以用系統化的方式來撰寫機器人的行為。這個系統化的方式是 Finite State Machine,概念上跟之前介紹過的 ecto 的 graph 概念有點相似。
簡單來說,就是讓我們可以很方便地定義機器人的各種狀態,所以機器人就不再只是根據程式碼裡面寫定的一連串行為去行動,而可以根據各種不同的條件進行狀態的切換。舉例來說,一個掃地機器人平時處於掃地狀態時,他要做的事情就是移動跟吸塵,而當機器人看到障礙物的時候,就可以切換到避開障礙物的狀態,等到障礙物消失的時候,再切換到掃地狀態。
想要對 SMACH 有更具體的概念嗎? 可以看看這個影片:

雖然 SMACH 跟 ROS 可以一併使用,他的核心其實是一個跟 ROS 沒有關係的 Python library,是透過 smach_ros 來跟 ROS 的 topics, services 跟 actions 串接。
使用 SMACH 的幾大好處
我們雖然知道 Finite State Machine 可以建立由狀態來決定行為的程式,但除了這個之外還有幾個特點,讓我們可以在適當的時候使用 SMACH。
- Task Hierarchy: state 可以由更多小 state 組成,建立複雜的行為
- Task Priority: state 之間可以有優先權,有高優先權的 state 可以中斷低優先權的 state
- Concurrency: 如果想要同時執行多項行為,也可以用 SMACH 來實現
SMACH 基本小程式
這邊我們用個簡單的範例來介紹要怎麼創造一個 state machine,首先呢,最重要的東西就是 state,在 SMACH 的語法規定中,每個 state 用一個 class 來寫,其中要包含 init 和 execute 兩個函式,實際執行的行為會被寫在 execute 函式裡面。
當每個 state 的行為都被定義好之後,剩下要寫的就只需要在 main 中,將各個 state 加入 SMACH 的 container (其實 state machine 就只是一個包含很多 state 的 container 而已) 就好。
在下面的範例中,只有兩個簡單的 state - FOO 和 BAR,他們的關係如下圖:
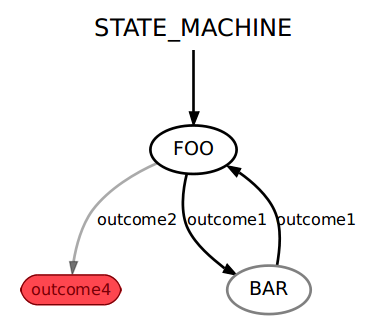
1 | #!/usr/bin/env python |
總結
今天跟大家簡介了 SMACH 這個 package,也介紹了要怎麼寫一個非常小的 state machine,SMACH 可以做到相當複雜的行為,如果有興趣的話,可以去看看延伸閱讀中提供的教學,裡面有相當完整詳細的說明。
其實要撰寫比較複雜的機器人行為,除了 finite state machine 之外,behavior tree 跟 teer 都是常見的選擇,根據應用的不同可以選擇自己想要的方法。連結可以在延伸閱讀的地方找到喔!
留言討論