深入學習 LSD-SLAM-1
前言
SLAM 是近年來很火紅的一個技術,也有不少文章在介紹,不過我很少看到針對一些頂級演算法的深入介紹,所以才想透過這篇文章來開始深入很久以前玩過的LSD SLAM,也跟大家一起學習這個迷人的演算法。建議有興趣的讀者先讀過這篇平易近人的 Visual SLAM 簡介,然後再繼續往下看,會更有感覺!
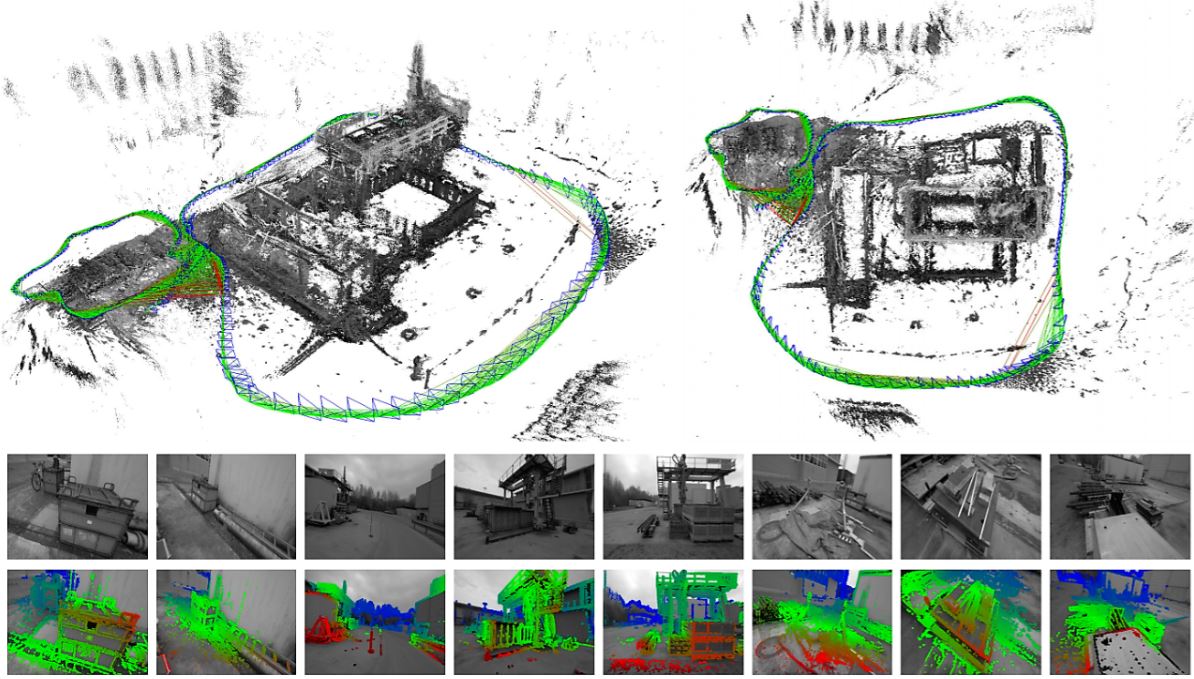
先放一張 LSD-SLAM 建出來的地圖,讓大家感受一下帥度。
安裝方式
安裝方式可以到 LSD-SLAM 的 github page 看看,筆者很久以前跑過 Ubuntu 12.04 上面的版本,建議可以看看作者的溫馨提示,比較容易建出好的地圖。
如果想看中文的安裝教學,也可以看看這一篇 LSD-SLAM 編譯過程 (Ubuntu 14.04 + ROS Indigo)
演算法簡介
從上圖中我們可以看到,LSD-SLAM 演算法的一個特色就在於它不需要計算特徵點,這個特色在 real-time 的應用中滿重要的,畢竟一般影像是以 30 fps
的速率進來,也就是一張影像只能處理 33 ms,要怎麼在這麼短的時間內就處理完一幀,是一個問題。有些計算特徵的演算法雖然厲害(例如 SIFT、ORB),但計算時間太長,佔掉 30 ms 的一大部分,就很難在 real-time 應用中派上用場。
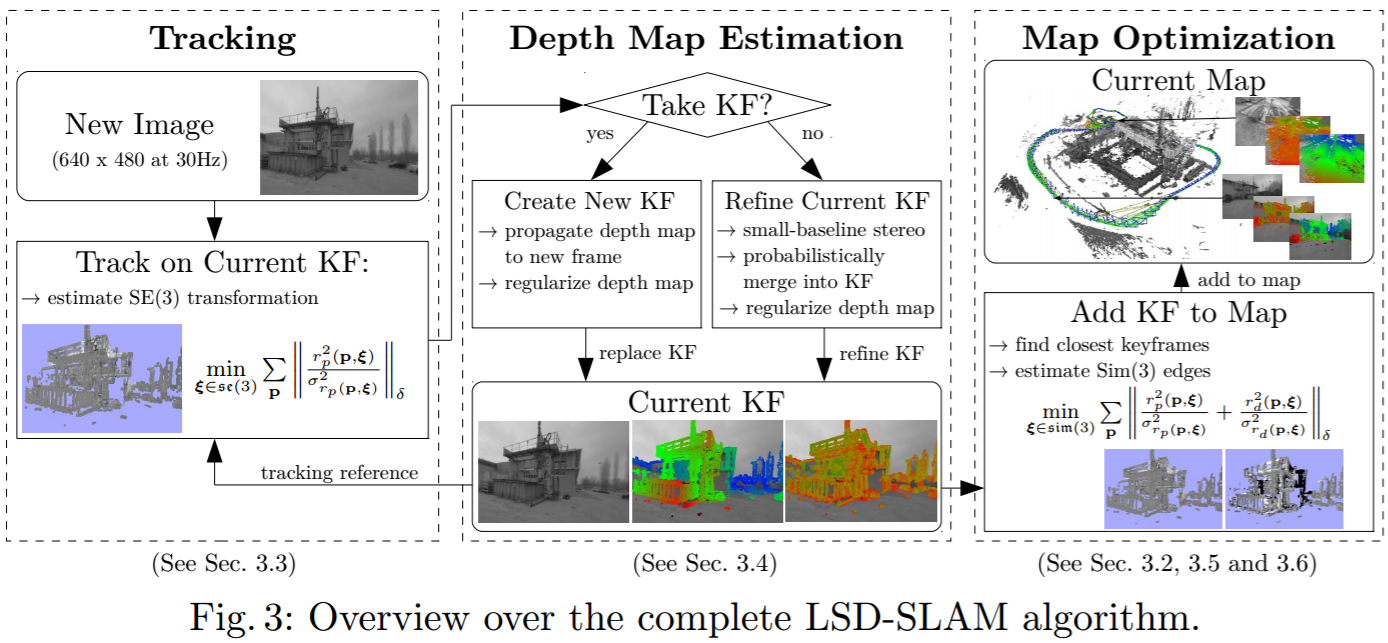
LSD-SLAM的基本想法就是利用所有 pixel 資訊不斷計算目前相機所在的位置,等到目前的位置離前一個 keyframe 足夠遠,就儲存一張新的 keyframe。並且在過程中不斷計算 depth map 形成 point cloud map,也不斷對 map 做 optimization 計算。
如此一來,就可以形成一個完整的 map,整個 map 就是一個巨大的 pose graph,graph 裡面的 vertice 是 keyframe,edge 就是連接 keyframe 的 3D similarity transform。
總結
這篇很簡單地介紹了 LSD-SLAM,算是一個起頭,讓大家對這個演算法有基本的認識,之後我會慢慢深入裡面的細節,也會逐漸變得好玩!
延伸閱讀
- 雷鋒網 SLAM 相關文章
- 相機位姿估計0:基本原理之如何解PNP問題
- SLAM Tutorial@ICRA 2016
- 高翔大神的blog
- CMU Designing Computer Vision Apps - lecture 19
關於作者:
@pojenlai 演算法工程師,對機器人跟電腦視覺有少許研究,最近在鍛鍊自己的執行力
留言討論