深入學習 LSD-SLAM - 2
前言
上回我們在深入學習 LSD-SLAM - 1中提到,LSD-SLAM 的一大特色是不計算特徵點、直接使用所有 pixel 來計算相機的姿態。但是,每一幀都有 640x480 個 pixel (作者建議使用 640x480 解析度的相機),該怎麼處理這些資料呢?今天就來學習 direct method 的基礎。
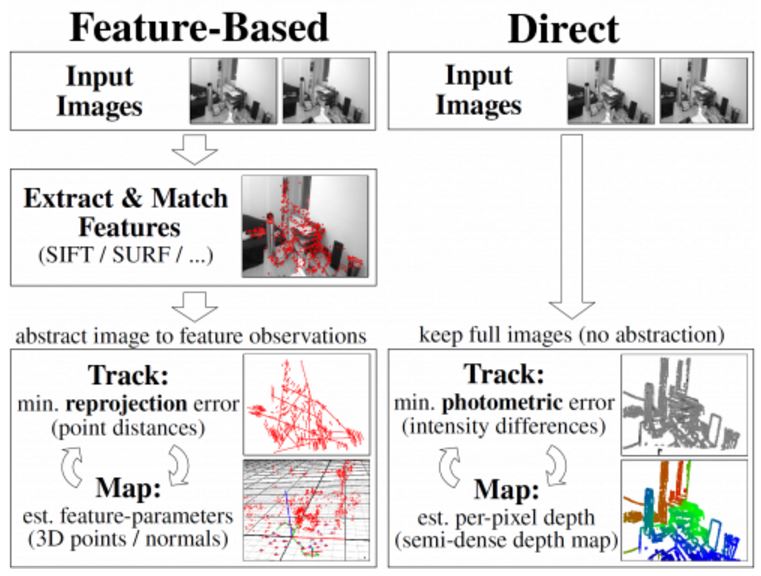
在開始之前,我們可以從下圖清楚地看出 Feature-Based Method 跟 Direct Method 的差別,其實就是差在有沒有先抽取特徵點。
Direct Method 的基本概念
使用條件與假設
Direct method 是直接根據 pixel 值來計算相機姿態,這個方法要成立,需要建立在一個假設 - 灰階程度不變之上。
1 | 灰階程度不變假設: 同一個空間點在不同影像中的亮度值相同 |
就是因為有灰階程度不變的假設,我們才能夠直接使用 pixel 值來計算相機姿態,雖然這個假設在現實中常常不成立,但是我們還是可以在這假設之上計算出漂亮的地圖。
怎麼讓電腦來解這個問題?
若灰度不變假設成立,那我們就可以開始進行下一步了!但如果你摩拳擦掌地想要開始來寫程式,會發現一件事 - 要怎麼開始寫程式咧?
這時候,就是數學派上用場的良機了。請看看下面這個投影片的 Direct method 部分:
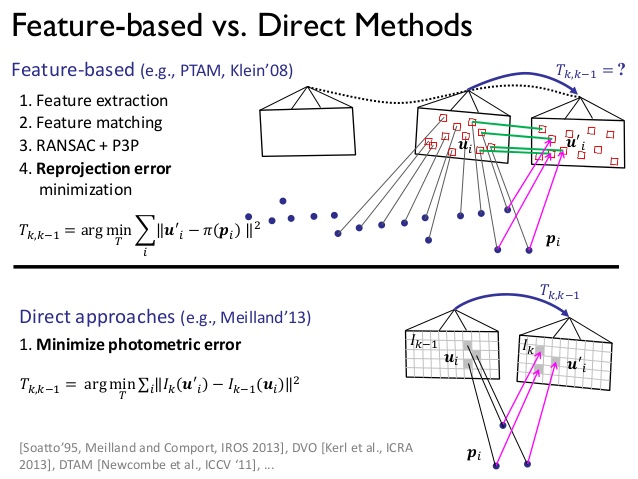
在世界中的一點 $p_i$,會投影在兩個時刻 ($k-1$ 與 $k$) 相機拍到的畫面上,形成 $u_i$ 以及 $u’i$,我們要做的事情,就變成找出讓 $ \sum{i} || I_k(u\prime_i)-I_k-1(u_i)||^2 \ $ 最小的 Transform - $T_k,k-1$。
於是我們得到了一個可以被最佳化的東西,稱為 Photometric error,有了這個 error,我們就知道寫程式的時候要優化的值是什麼、什麼叫做好的 pose estimation,也才有機會進行下一步。
如果想要更加體會最佳化是什麼樣的動態過程、增加腦海中的對最佳化的想像畫面,我很推薦你去看看這篇文章的 “6.直接法的討論”,裡面的舉例應該非常好懂,也可以加深體會。
其實這一塊要繼續討論下去才能夠真正接到程式碼,不過要再繼續深入,需要不少數學基礎,我會在之後的系列漸漸補上,然後再回來 revisit。
總結
這次跟大家介紹了 LSD-SLAM 的基礎,如果不懂 Direct method,就無法再深入體會 LSD-SLAM 的奧妙,我們下回見!
延伸閱讀
關於作者:
@pojenlai 演算法工程師,對機器人跟電腦視覺有>少許研究,最近在鍛鍊自己的執行力
留言討論