深入學習 LSD-SLAM 番外篇 - RDS X RTAB-Map
前言
因為前陣子因緣際會發現了 Robot Ignite Academy 跟 ROS Develop Studio(RDS),很希望可以推薦給我們的讀者。所以這期專欄我延伸一下 LSD SLAM 系列,先跟大家介紹這個很酷的學習資源,並介紹跟 LSD SLAM 目的相似的 RTAB-Map 演算法。
為什麼要介紹 RDS?
學習的方法有許多種,借引用這一週很紅的 英文學習 repository 的圖:
學習越難的東西,越不容易只靠單一學習資源就學通透,舉例來說,你很難只看文章不動手實作就真的學會寫程式。
同樣地,學習機器人如果不碰機器人,很難真正弄懂機器人。Gazebo 的出現確實幫助許多無法輕易取得機器人的人,使用模擬機器人來學習。但是,如果對 Linux 不熟,很可能在環境安裝的階段就會碰到障礙導致學習中斷。
今天介紹的 RDS 就可以先排除學期初期的環境設定問題,直接使用 Web UI 來呈現模擬器、command window、檔案系統,讓使用者可以直接切入機器人的開發。除此之外,Robot Ignite Academy 直接提供了跟 RDS 整合在一起的線上課程,等於是你完全不需要有任何基礎準備,你只要有一個瀏覽器,就可以連上 RDS 開始學習機器人。
就是因為他們提供了一個很方便的學習環境,所以我才想寫一篇文章來跟大家分享,或許可以幫助更多人更容易感受到學習機器人的滋味。
RDS 簡介
RDS 是 The construct 這間公司開發出來的工具,下圖是我去上他們的課程截的圖,你可以看得出來,最左邊是課程內容,右邊有檔案系統的 UI、模擬器畫面,下方還有 command window 以供輸入指令。視窗的安排也有幾種配置方式,可以隨自己喜歡去編排。
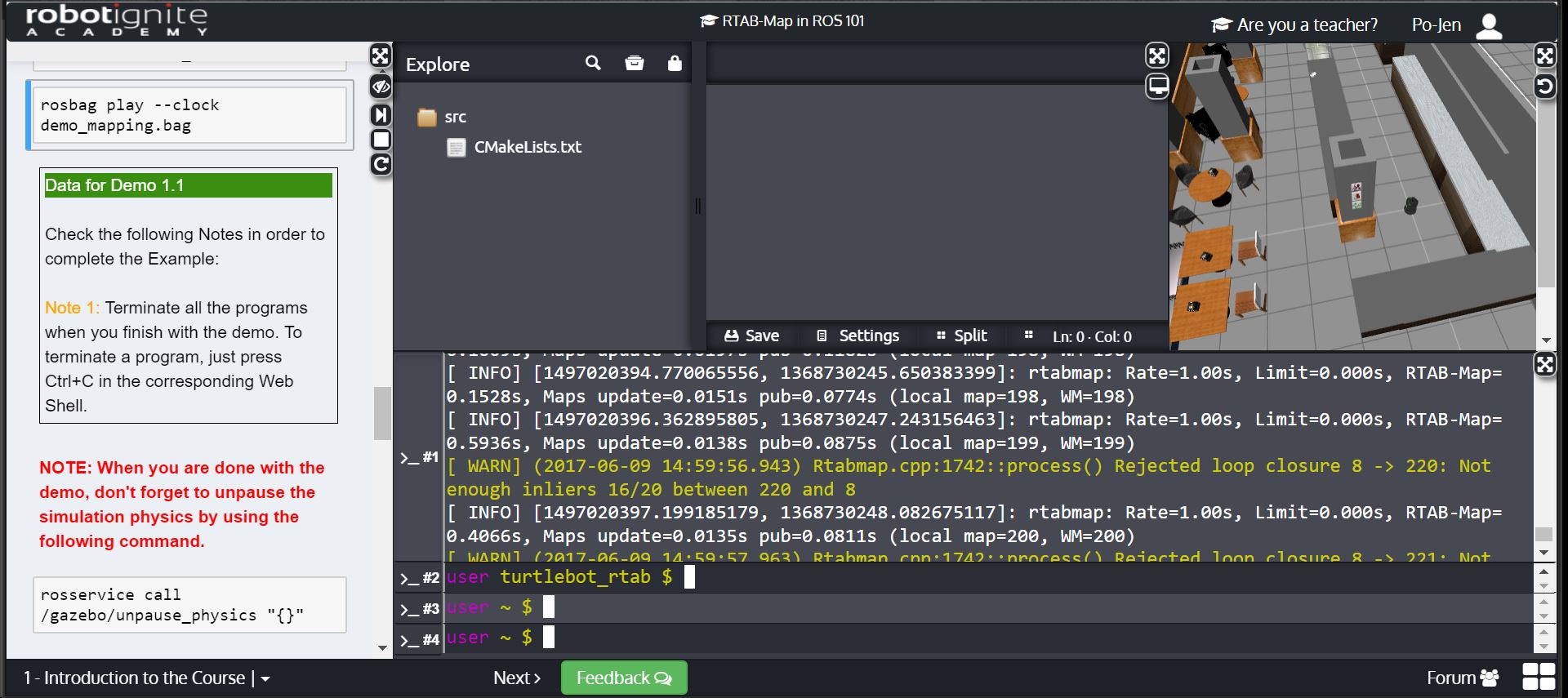
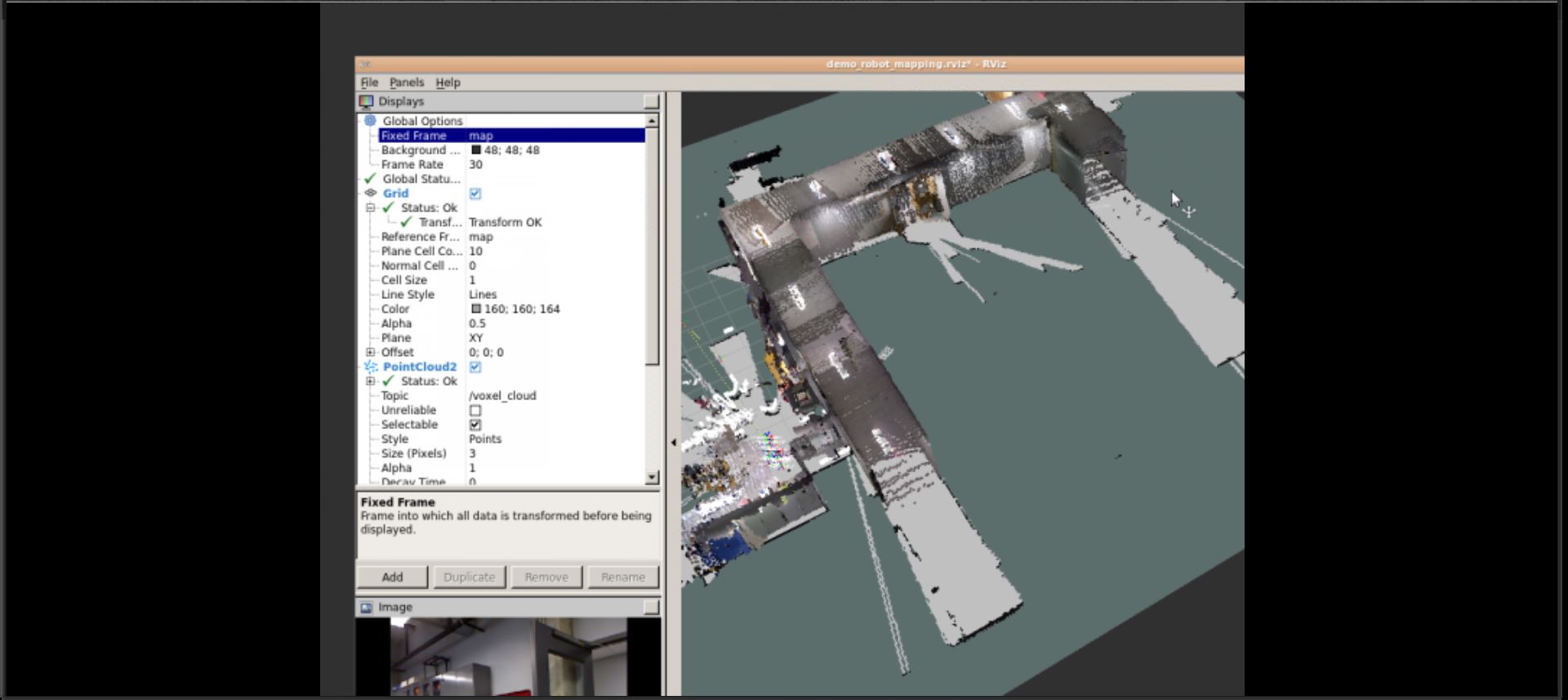
想要使用 RViz 等工具也不用緊張,可以額外開一個分頁顯示桌面,個人覺得應有盡有了。
Robot Ignite Academy
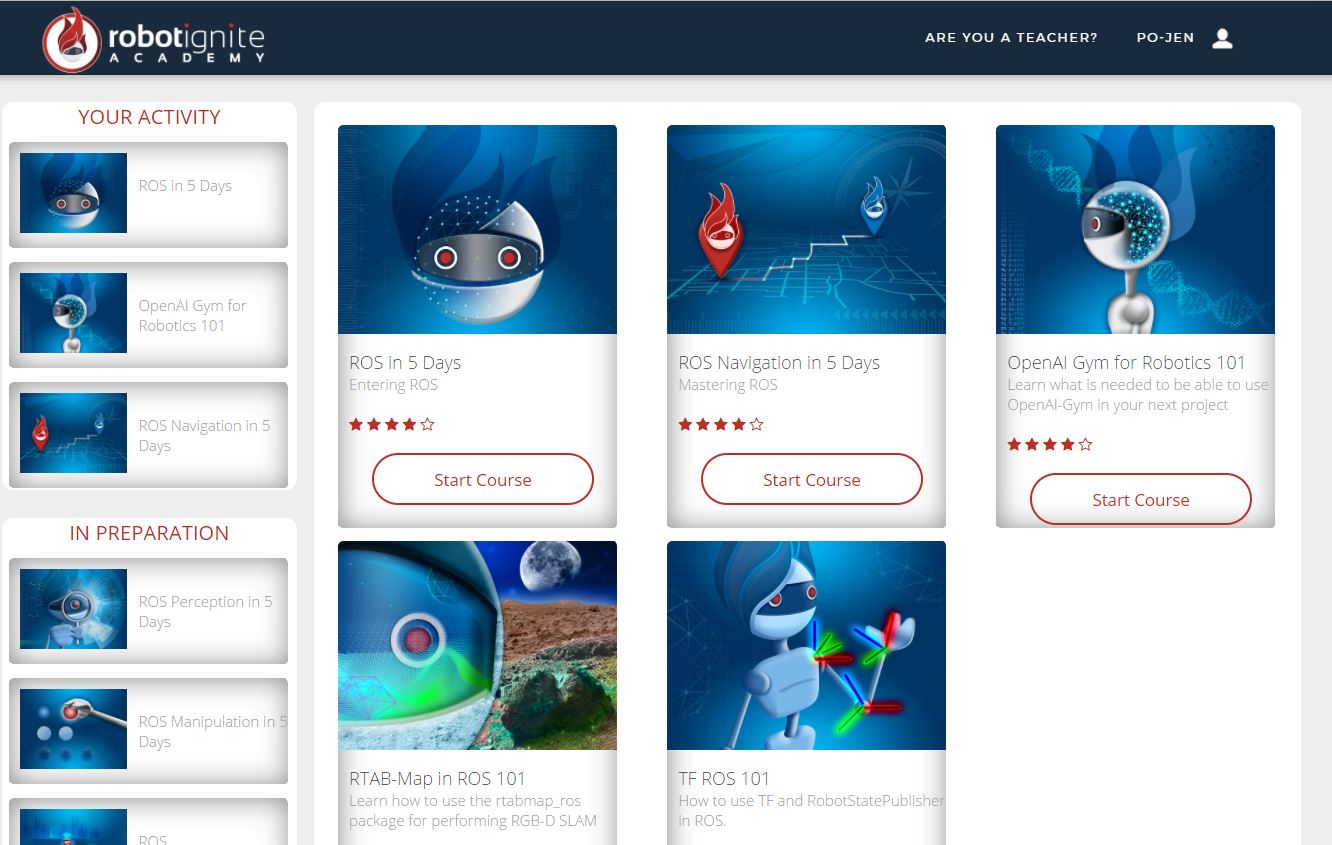
看完上面的介紹,你可能會問,現在有哪些東西可以用 RDS 學?
基本上都在這個截圖裡了,是說未來也還會再增加,所以有興趣的讀者可以持續關注。
RTAB Map 簡介
RTAB-Map (Real-Time Appearance-Based Mapping) 是一種 RGB-D SLAM 的方法,跟 LSD SLAM 的目的很像,都是為了建出 3D 地圖並定位感測器位置,最主要的差別在於,LSD SLAM 使用的感測器是一個 RGB camera,而 RTAB-Map 使用的是 Kinect 這種 RGB-D camera。
這個番外篇沒有要詳細介紹這個演算法的設計概念,所以就直接從使用的角度出發啦。
因為 RTAB-Map 本身是一種 SLAM 的演算法,有人寫了 rtabmap_ros 這個 package,要在 ROS 中跑起 RTAB-Map 直接靠這個 package 就行了。不過要使用,還是需要一些基本的認知,接下來就簡短地跟大家介紹一下!
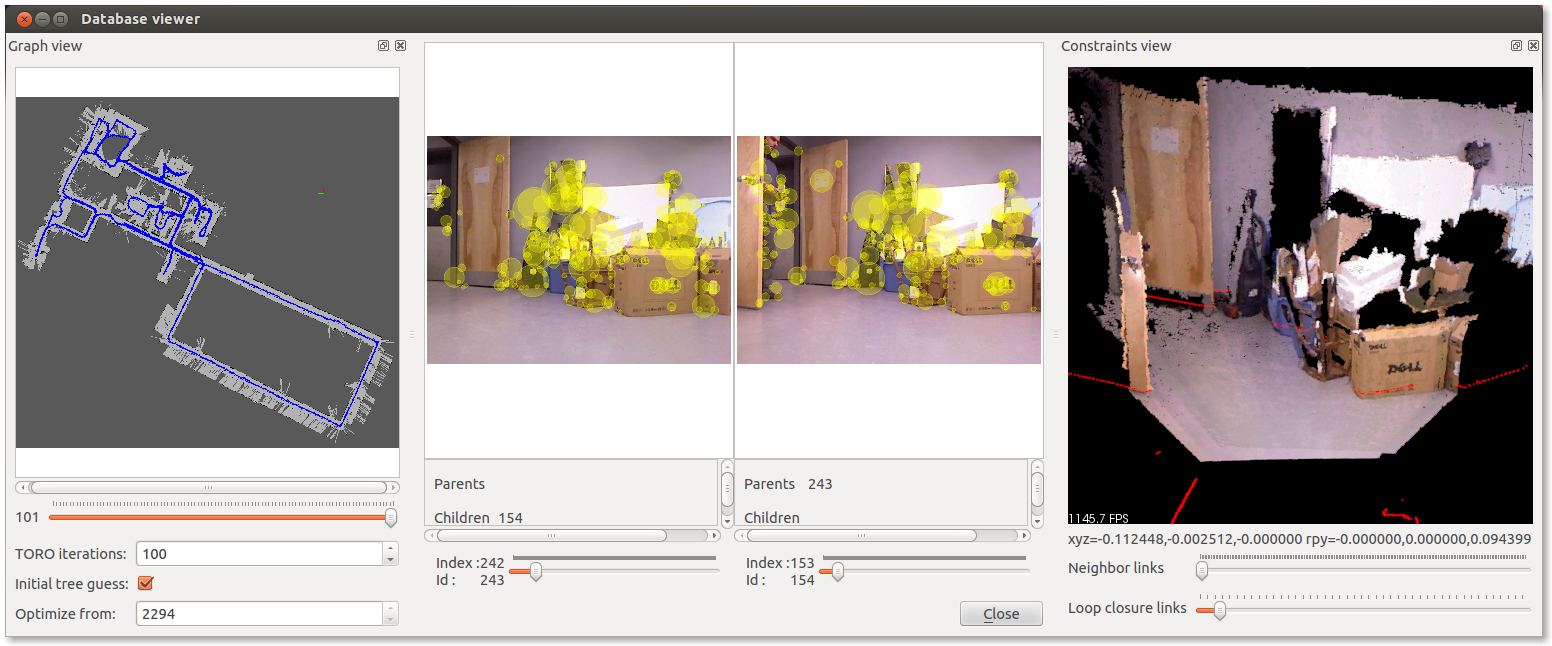
RTAB-Map 基本上有兩個模式 - Mapping mode 跟 Localization mode,Mapping mode 顧名思義就是建地圖,RTAB Map 會把地圖資料(例如影像、2D 地圖、3D 地圖)存起來,可以見下圖。
Localization mode 就是根據已經建好的地圖資料庫,來定位機器人現在的位置,一旦可以將機器人感測到的資料對應到地圖,就算是定位成功。
實際操作 RTAB-Map
如果你去試玩看看他們的課程,直接用下面幾個指令就可以準備好所有東西,然後用你的鍵盤操控 turtlebot 就可以開始建地圖了。
1 | roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" |
如果你有自己的 RGB-D sensor 想要玩,那你就直接參考安裝方法跟RGB-D Hand-Held Mapping With a Kinect也可以很快上手!
然後你可以用這一個指令啟動 Localization mode,那機器人收到的感測器資料就會被拿來跟地圖比對:
1 | roslaunch rtabmap_ros rtabmap.launch localization:=true |
哈不過之所以能這麼容易就啟動,也是因為 launch 檔把這個黑盒子包得很好,你可以去看看 rtabmap.launch。
總結
這週跟大家介紹了 Robot Ignite Academy、ROS Develop Studio 跟 rtabmap_ros,希望大家學習愉快!
留言討論