Udacity RoboND - Rover project 簡介
前言
最近 Udacity 的 nano degree 算是滿紅的,他們也有把很多教學資源放到 github 上面,例如 Rover project,我覺得拿來上手還不錯,以下就稍微來簡介一下這個 project 有趣的地方。
Project 簡介

這個 project 是要讓 Rover 在世界中自由自在地行走,然後尋找特定的岩石樣本並收集,因為他們將岩石的顏色設計得跟背景很不一樣,所以我們只要可以在環境中走來走去,然後一直尋找畫面中有沒有黃黃的、像是黃金的石頭就好了:

對收到的影像做處理,得到可以走的區塊
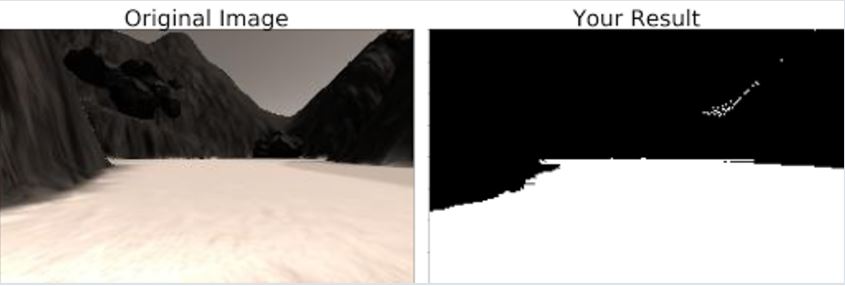
首先,機器人要知道哪邊可以走、哪邊不能走,所以在收到 camera 的影像後,要先處理一下,濾出可以走的區塊,
1 | import matplotlib.pyplot as plt |
這樣就可以畫出結果了:
產生地圖
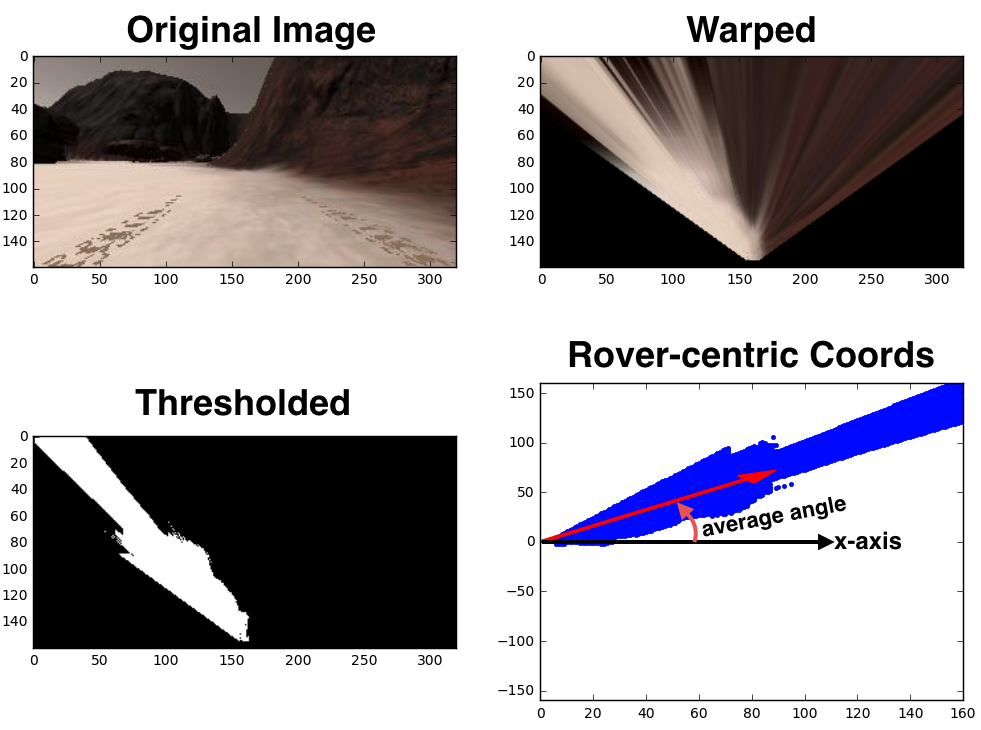
雖然我們從影像中,得知了目前可以走的區塊,但隨著機器人一直走來走去,就會得到一張張的影像,每張裡面都有可以走的區塊。如果可以把這一張張的影像接起來,變成地圖,那事情就會方便許多!所以我們可以透過 perspective transform 將影像變成從俯視的 view 觀看,然後再將影像轉換到以 Rover 為中心的坐標系就可以了。
1 | import numpy as np |
1 | import matplotlib.pyplot as plt |
綜合起來,就可以得到

根據地圖產生新的移動方向
假設已經有了地圖,下一步就是希望得到要走的方向,最簡單的想法就是挑可以走的範圍的中線,因為離障礙物最遠。但我們前面的表示法,是把每個 pixel 用 (x,y) 這種笛卡爾坐標系下的定義來儲存位置,即便我們有這些可行走區域的 (x,y) 位置,要從這些 (x,y) pair 中找出中線還是頗麻煩的。
所以這邊就會用到小時候學過的極座標啦,大家可以想一想,如果我們有每一個可走區域的 pixel 的極座標,那是不是把每一個點的角度都平均一下,就可以得到要行走的角度了呢?
根據上面的觀念,我們就再寫一下從笛卡爾座標轉換成極座標的 function:
1 | import matplotlib.pyplot as plt |
就可以畫出下圖:
總結
今天跟大家簡單介紹了一下 Udacity 的學習資源,也簡介了一點點 Rover project 的內容,我自己覺得他們的 project 設計都還不錯,值得玩一玩,適合想要入門的讀者參考。
延伸閱讀
關於作者:
@pojenlai 演算法工程師,對機器人跟電腦視覺有少許研究,最近在學習看清事物的本質與改進自己的觀念
留言討論